सीमेंस पीएलसी यामाहा रोबोट को नियंत्रित करता है
प्रकाशित:2023-01-28 16:00:06
यह पत्र सीमेंस पीएलसी द्वारा नियंत्रित यामाहा रोबोट की नियंत्रण रणनीति का परिचय देता है, कमांड शब्द सेट करने के लिए बाहरी आईओ पोर्ट का उपयोग करता है, ताकि पीएलसी रोबोट के साथ संवाद कर सके, और रोबोट को संबंधित कार्रवाई खत्म करने का निर्देश दे सके।
सीमेंस S7-300PLC अब हमारे देश में एक व्यापक रूप से उपयोग किया जाने वाला बड़ा और मध्यम आकार का पीएलसी है, इस पर शोध और डिवाइस स्वचालन के क्षेत्र में परिधीय रोबोट नियंत्रण रणनीति का बहुत महत्व है। इस पत्र में, लिथियम बैटरी लाइन के अनुसंधान और उत्पादन के आधार पर, सीमेंस S00और यामाहा रोबोट का संचार और नियंत्रण पूरा हो गया है, और स्टील बार की दो प्रमुख प्रक्रियाओं का अनुसंधान और विकास और लिथियम बैटरी डिवाइस की प्रक्रिया में मुद्रांकन पूरा हो गया है।
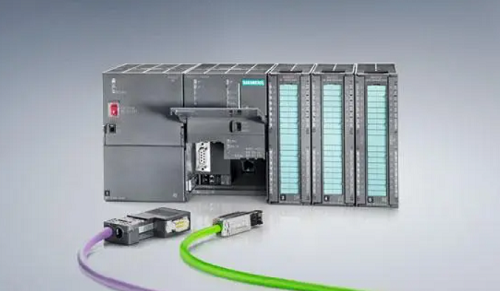
1. कुल मिलाकर हार्डवेयर डिजाइन
सीमेंस S7-300PLC और YAMAरोबोट कंट्रोलर कनेक्शन को रोबोट स्टार्ट सिग्नल, इमरजेंसी स्टॉप सिग्नल, फॉल्ट सिग्नल और रीसेट सिग्नल से जोड़ने की जरूरत है, सिग्नल के चार समूहों के माध्यम से और पीएलसी कनेक्शन नियंत्रण रोबोट की बुनियादी आवश्यकताओं तक पहुंच सकता है। पीएलसी रोबोट से जुड़ा हुआ है। आम तौर पर, पीएलसी का उपयोग भेजने वाले निर्देश पक्ष के रूप में किया जाता है और रोबोट का उपयोग प्राप्त निर्देश पक्ष के रूप में किया जाता है। प्रत्येक बिंदु पर चलने वाले पीएलसी नियंत्रण रोबोट के उद्देश्य तक पहुंचने के क्रमबद्ध करना में, पीएलसी और रोबोट आईओ सिग्नल संचार स्थापित करने की आवश्यकता होती है।
लिथियम बैटरी डिवाइस की प्रक्रिया में स्टील बिछाने और मुद्रांकन प्रक्रियाओं के तकनीकी अनुसंधान के साथ संयुक्त, यह प्राप्त किया जाता है कि रोबोट के चलने के बिंदु 16 बिंदुओं से अधिक नहीं होंगे। 8421 द्वारा बिंदु बिंदुओं की गणना के अनुसार, रोबोट और पीएलसी के कनेक्टिंग पॉइंट 4 बिंदु हैं। पीएनपी मानक रोबोट को सीमेंस के साथ जोड़ने के लिए चुना गया है। सिग्नल कनेक्शन में दो भाग शामिल हैं: एक भाग शुरुआत, आपातकालीन स्टॉप, गलती और रीसेट सिग्नल है; एक भाग पीएलसी और रोबोट के बीच चार बिंदुओं पर संचार लाइन है; संकेतों के आठ सेट हैं।
2. कुल मिलाकर सॉफ्टवेयर डिजाइन
रोबोट जांच के लिए सॉफ्टवेयर नियंत्रण रणनीति, पूरे नियंत्रण को लागू करने के लिए पीएलसी कमांड विधि। एक उदाहरण के रूप में स्टैकिंग रोबोट को लें, रोबोट वापसी के बाद सिग्नल 1001 जांच भेजता है, रोबोट को इंजीनियरिंग आवश्यकताओं के अनुसार सिग्नल मिलता है, रोबोट को लक्ष्य उन्मुखीकरण पर जाने का निर्देश दिया जाता है, लक्ष्य उन्मुखीकरण संकेत है (0001 -- 1011) कुल 9 अंक, बिंदु स्थिति रोबोट को जगह में ले जाते हैं, एक साथ रोबोट को सूचित करने के लिए एक संकेत भेजने के बाद, रोबोट अन्य बाह्य उपकरणों (सिलेंडर, मोटर्स, आदि) की कार्रवाई को नियंत्रित करता है, और रोबोट को बताता है कार्रवाई समाप्त होने के बाद स्थिति में लौटने के लिए। रोबोट के स्थिति में लौटने के बाद, यह सेटिंग निर्देश की प्रतीक्षा करना जारी रखता है। एक एक्शन लूप समाप्त होता है।
सीमेंस S7-300PLC और यामाहा रोबोट के बीच संचार और नियंत्रण के माध्यम से, स्टील बार का अनुसंधान और विकास और लिथियम बैटरी डिवाइस की प्रक्रिया में दो प्रमुख प्रक्रियाओं की मुद्रांकन पूरा हो गया है। बैटरी डिवाइस क्षेत्र में उपयोग किए जाने वाले सिग्नल ट्रांसमिशन एंड लिंकेज की विधि के माध्यम से पीएलसी और रोबोट की एक अच्छी प्रदर्शन भूमिका है; अन्य बैटरी डिवाइस अनुक्रम, अन्य संदर्भ पीएलसी और रोबोट नियंत्रण विधि और नियंत्रण रणनीति में उपयोग किया जा सकता है, पीएलसी नियंत्रण रोबोट के अधिकांश को काम के बिंदु पर समाप्त कर सकता है, एक अच्छा पदोन्नति प्रभाव है।
-
 202212-30
202212-30सीमेंस ऑपरेटिंग पैनल (HMI) क्रमबद्ध करना नंबर पूरा
सीमेंस ऑपरेटिंग पैनल (HMI) क्रमबद्ध करना नंबर पूरा - सीमेंस टच स्क्रीन क्रमबद्ध करना नंबर पूरा
-
 202301-09
202301-09श्नाइडर फ्रेम सर्किट ब्रेकर एमटी सर्किट ब्रेकर स्विच समस्या को बंद करने में विफल रहा
श्नाइडर संरचनात्मक सर्किट ब्रेकर ने ऊर्जा संग्रहीत नहीं की है (ऊर्जा भंडारण मोटर की बिजली की आपूर्ति की जांच क···
-
 202301-29
202301-29वायु पृथक्करण प्रक्रिया में श्नाइडर उपकरण की भूमिका
उपकरण की सतह वायु पृथक्करण उपकरण और गैस शोधन की प्रक्रिया में महत्वपूर्ण भूमिका निभाती है। यह वायु पृथक्करण प्···
-
 202308-03
202308-03उपयोग से पहले मित्सुबिशी इन्वर्टर कमीशन प्रक्रिया
सबसे पहले, मित्सुबिशी इन्वर्टर नो-लोड पावर टेस्ट।1. मित्सुबिशी आवृत्ति कनवर्टर के ग्राउंड टर्मिनल को ग्राउंड क···
-
 202301-11
202301-11एडेप्टेक औद्योगिक कंप्यूटर मुख्य विशेषताएं और उपयोग सावधानियां
एडेप्टेक औद्योगिक कंप्यूटर की मुख्य विशेषताएं:1. एडेप्टेक औद्योगिक कंप्यूटर को लंबे समय तक लगातार काम करने की ···


 +8618621383628
+8618621383628 +8613811814778
+8613811814778 info@zhongpingtech.com
info@zhongpingtech.com बिल्डिंग 26, लियुआन समुदाय, चाओयांग जिला, बीजिंग, चीन
बिल्डिंग 26, लियुआन समुदाय, चाओयांग जिला, बीजिंग, चीन